![]()
- Từ khóa tìm kiếm:
- Tụ điện, Điện trở, IGBT..
-
Trang chủ


-
ĐỘNG CƠ VÀ PHỤ KIỆN
- Module Điều Khiển Động Cơ L298









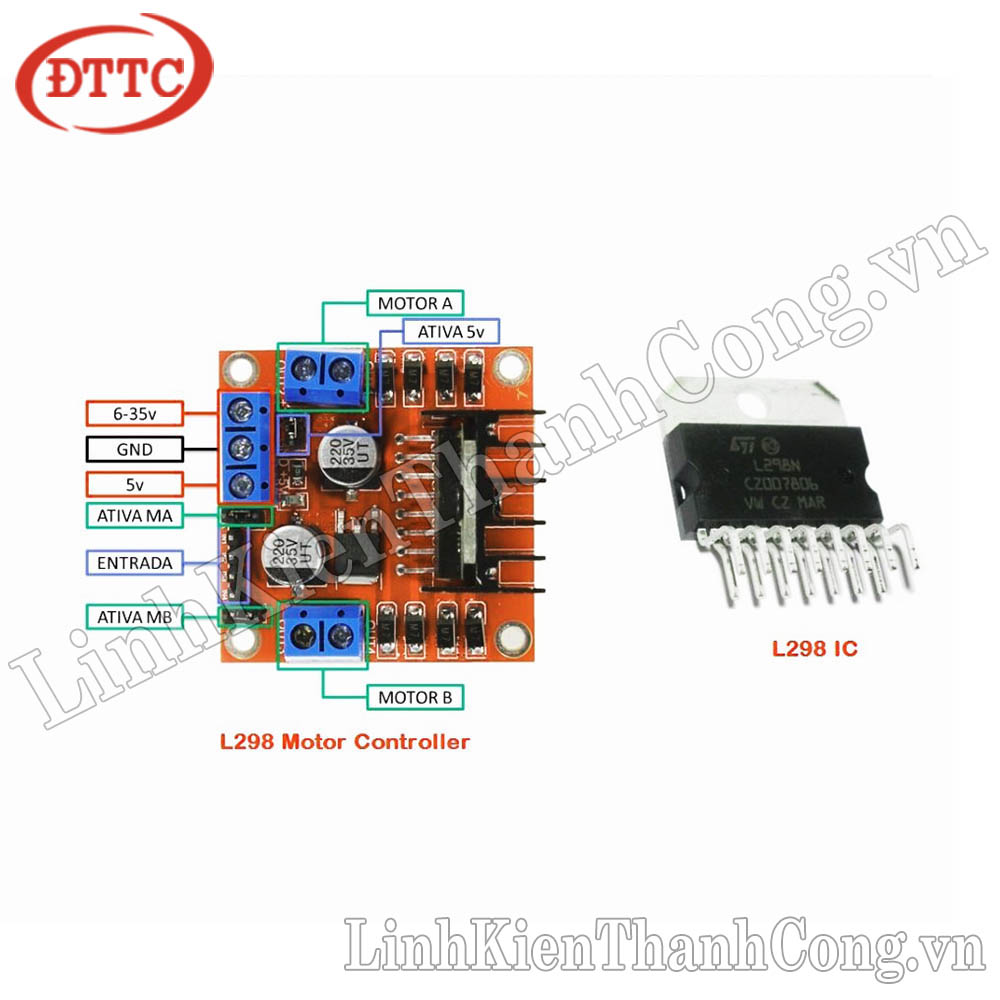
MODULE ĐIỀU KHIỂN ĐỘNG CƠ L298
TÍNH NĂNG SẢN PHẨM
- MODULE ĐIỀU KHIỂN ĐỘNG CƠ L298 thường dùng trong việc điều khiển các loại động cơ DC, động cơ bước.
- Sản phẩm có kích thước nhỏ gọn và rất chắc chắn, các linh kiện bố trí rất gọn gàng và hợp lí tạo nên một sản phẩm chất lượng khi tới tay người dùng.
- Phù hợp với rất nhiều nhu cầu như học tập, nghiên cứu, DIY,...
- Tuỳ thuộc vào mục đích sử dụng mà chúng ta sẽ chọn cho mình một bộ sản phẩm phù hợp.
THÔNG SỐ KĨ THUẬT
- Sản phẩm sử dụng IC L298N kèm theo các thông sô kĩ thuật:
+ Module L298 có thể điều khiển 2 động cơ DC hoặc 1 động cơ bước, có 4 lỗ nằm ở 4 góc thuận tiện cho người sử dụng cố định vị trí của module.
+ Có gắn tản nhiệt chống nóng cho IC, giúp IC có thể điều khiển với dòng đỉnh đạt 2A và IC L298N được gắn với các đi ốt trên board giúp bảo vệ vi xử lý chống lại các dòng điện cảm ứng từ việc khởi động/ tắt động cơ.
- Driver L298N tích hợp hai mạch cầu H
+ Điện áp điều khiển: +5 ~ 12VDC
+ Dòng Max cho mỗi cầu H là: 2A
+ Điện áp của tín hiệu điều khiển: +5 ~7VDC
+ Dòng của tín hiệu điều khiển: 0 - 36mA
+ Công suất hao phí: 20W (t = 75°C)
+ Bảo quản trong môi trường có nhiệt đồ từ: -25°C ~ 130°C
- Kích thước: 55 x 49 x 33mm
- Khối lượng: 33g
DATASHEET
- Các bạn có thể tham khảo Datasheet L298N >>>Tại Đây<<<

HƯỚNG DẪN ĐẤU NỐI
Bước 1:
- Kết nối điện áp đầu vào từ 6 ~ 35VDC cho mạch
Bước 2:
- Kết nối đầu ra tại 2 vị trí cầu H, với dòng tối đa cho mỗi cầu là 2A
- Nguyên lí hoạt động của các thành phần trên mạch:
+ OUT 1, OUT 2 là 2 đầu ra tương ứng khi kết nối động cơ 1.
+ OUT 3, OUT 4 là 2 đầu ra tương ứng khi kết nối động cơ 2.
+ Trên mạch có các chân ENA, IN1, IN2, IN3, IN4, ENB với các chức năng điều khiển tương ứng với 2 động cơ kết nối với 2 vị trí OUT 1,2 và OUT 3,4.
+ ENB: có chức năng điều khiển tốc độ động cơ khi kết nối vào 2 vị trí OUT 3, OUT 4.
+ ENA: có chức năng điều khiển tốc độ động cơ khi kết nối vào 2 vị trí OUT 1, OUT 2.
+ IN1, IN2, IN3, IN4: là chân kết nối tín hiệu với VĐK như Arduino,... để điều khiển động cơ xoay.
+ Nguyên tắc hoạt động của IN1, IN2 và IN3, IN4 như sau: cấp tín hiệu vào IN1 và IN2 chênh lệch nhau, mức cao/thấp điều khiển động cơ dừng/quay (có 2 TH cấp là: IN1 - cao và IN2 - thấp và IN1 - thấp và IN2 - cao). Cấp tín hiệu vào IN1 = IN2 thì động cơ dừng quay. Tương tự với cặp còn lại là IN3 và IN4 đều hoạt động tương tự như vậy.

HÌNH ẢNH SẢN PHẨM

CÁC SẢN PHẨM KHÁC




Bộ Điều Khiển Tốc Độ Động Cơ PWM DC 6V-90V 15A
100.000 VNĐ
- Mã sản phẩm: TC002570
- Thương hiệu: chưa rõ
- Mô tả ngắn: Bộ Điều Khiển Tốc Độ Động Cơ PWM DC 6V-90V 15A TÍNH NĂNG SẢN PHẨM - Bộ điều khiển tốc độ động cơ PWM thường dùng trong việc điều khiển các loại động cơ. - Sản phẩm có kích thước nhỏ gọn và rất chắc chắn, các linh kiện bố trí rất gọn gàng và hợp lí tạo nên một sản phẩm chất lượng khi tới tay người dùng. - Phù hợp với rất nhiều nhu cầu như học tập, nghiên cứu, DIY,... - Tuỳ thuộc vào mục đích sử dụng mà chúng ta sẽ chọn cho mình một bộ sản phẩm phù hợp. THÔNG SỐ KĨ THUẬT - Điện áp đầu vào: 6 ~ 90VDC - Dòng điện tối đa: 15A (nên sử dụng 60 ~ 70%) - PWM đầu ra: 0 - 100% - Tần số: 25 KHz - Kích thước: 64 * 59 * 28mm - Lưu ý: + Dòng điện vào là dòng DC không sử dụng trực tiếp dòng điện AC...

Module Điều Khiển Động Cơ PWM 12V/24V/36V/48V/60V 40A
150.000 VNĐ
- Mã sản phẩm: TC001545
- Thương hiệu: chưa rõ
- Mô tả ngắn: Module điều khiển động cơ PWM 12V/24V/36V/48V/60V 40A TÍNH NĂNG SẢN PHẨM - Module điều khiển tốc độ động cơ DC, được sử dụng để điều khiển động cơ DC theo phương pháp điều khiển độ rộng xung (PWM), việc điều khiển được thực hiện qua biến trở. - Module điều khiển động cơ theo phương pháp băm xung PWM, cho phép tốc độ động cơ tăng tuyến tính và không bị giật. - Sử dụng dễ dàng với 2 dây cấp nguồn và 2 dây ngõ ra động cơ. - Module hoạt động với hiệu suất cao, cho mô-men lớn mà không làm nóng động cơ quá mức qui định. - Sản phẩm có kích thước rất nhỏ gọn và dễ dàng sử dụng, với chi phí thấp. - Tuỳ thuộc vào nhu cầu sử dụng mà chúng ta sẽ chọn cho mình một bộ sản phẩm phù hợp nhất. THÔNG SỐ KĨ THUẬT - Điện áp làm việc: 9V...

Module Băm Xung PWM Điều Khiển Tốc Độ Động Cơ DC 12V-40V 10A
55.000 VNĐ
- Mã sản phẩm: TC001129
- Thương hiệu: chưa rõ
- Mô tả ngắn: Module Băm Xung PWM Điều Khiển Tốc Độ Đông Cơ DC 12V-40V 10A TÍNH NĂNG SẢN PHẨM - Module Băm Xung PWM thường dùng trong việc điều khiển động cơ một chiều. - Sản phẩm có kích thước nhỏ gọn và rất chắc chắn, các linh kiện bố trí rất gọn gàng và hợp lí tạo nên một sản phẩm chất lượng khi tới tay người dùng. - Phù hợp với rất nhiều nhu cầu như học tập, nghiên cứu, DIY,... - Tuỳ thuộc vào mục đích sử dụng mà chúng ta sẽ chọn cho mình một bộ sản phẩm phù hợp. THÔNG SỐ KĨ THUẬT - Điện áp đầu vào: 12 ~ 40VDC - Công suất: 0.01 ~ 400W - Dòng tĩnh: 0.02A (trạng thái chờ) - Chuyển đổi: 10 ~ 100% - Tần số: 13 KHz - Khối lượng: 72g HƯỚNG DẪN SỬ DỤNG Bước 1: Kết nối đầu vào từ 12 ~ 40VDC tại 2 vị trí POWER + và POWER - Bước 2:...

Bộ Điều Khiển Tốc Độ Động Cơ PWM 10-60V 20A
45.000 VNĐ
- Mã sản phẩm: TC001091
- Thương hiệu: chưa rõ
- Mô tả ngắn: Bộ điều khiển tốc độ động cơ PWM 12V/24V/36V/48V/60V 20A TÍNH NĂNG SẢN PHẨM - Bộ điều khiển tốc độ động cơ PWM thường dùng trong việc điều khiển các loại động cơ. - Sản phẩm có kích thước nhỏ gọn và rất chắc chắn, các linh kiện bố trí rất gọn gàng và hợp lí tạo nên một sản phẩm chất lượng khi tới tay người dùng. - Phù hợp với rất nhiều nhu cầu như học tập, nghiên cứu, DIY,... - Tuỳ thuộc vào mục đích sử dụng mà chúng ta sẽ chọn cho mình một bộ sản phẩm phù hợp. THÔNG SỐ KĨ THUẬT - Điện áp đầu vào: 10 ~ 60VDC - Dòng điện tối đa: 20A (nên sử dụng 10A) - PWM đầu ra: 0 - 100% - Tần số: 13 KHz - Kích thước: 77x45x28mm - Khối lượng: 73g HƯỚNG DẪN SỬ DỤNG Bước 1: Kết nối điện áp đầu vào tại 2 vị trí POWER + (Cực dương) và POWER - (Cực...


